全部产品分类
-
物联网
.png) 物联网综合实验箱(FS_WSN3399CH/CHJ)
物联网综合实验箱(FS_WSN3399CH/CHJ)
- 物联网综合实验箱(FS_5G3399CH/CHJ)
 物联网综合实验箱(FS_WSN6818CH/CP)
物联网综合实验箱(FS_WSN6818CH/CP)
 物联网综合实验箱(FS_WSN4412CH/CP)
物联网综合实验箱(FS_WSN4412CH/CP)
 物联网综合实验箱(FS_WSN6818BH/BP)
物联网综合实验箱(FS_WSN6818BH/BP)
- 物联网综合实验箱(FS_WSN4412BH/BP)
 NB/LoRa物联网开发套件(FS_LPWAN_B)
NB/LoRa物联网开发套件(FS_LPWAN_B)
-
AI人工智能
-
虚拟仿真系统
-
嵌入式ARM
-
嵌入式RISC-V
-
移动互联网
-
RFID
-
单片机
-
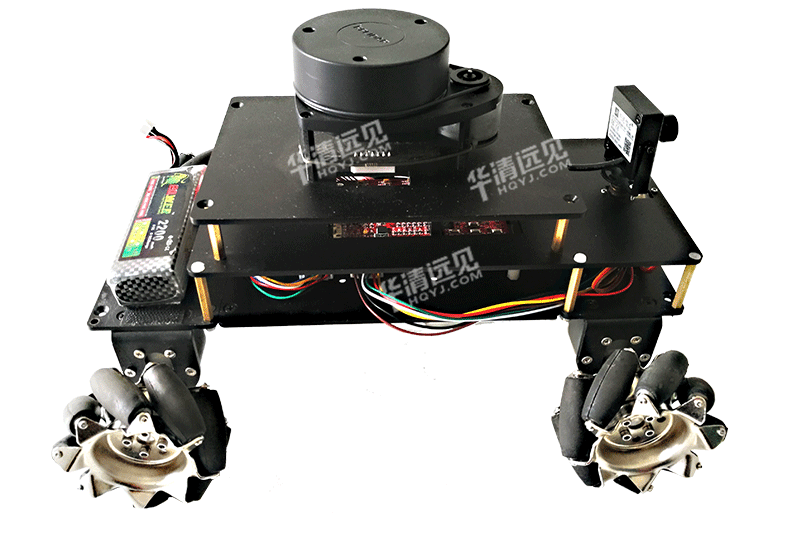
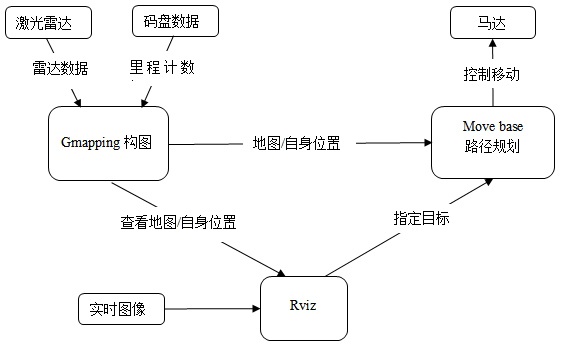
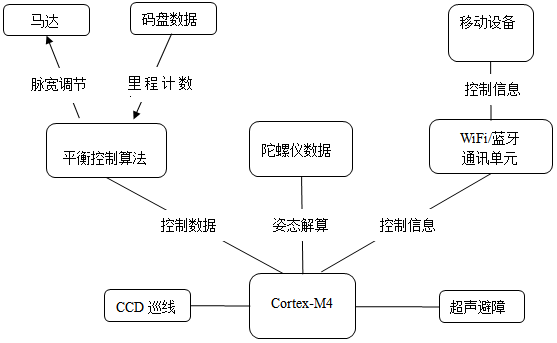
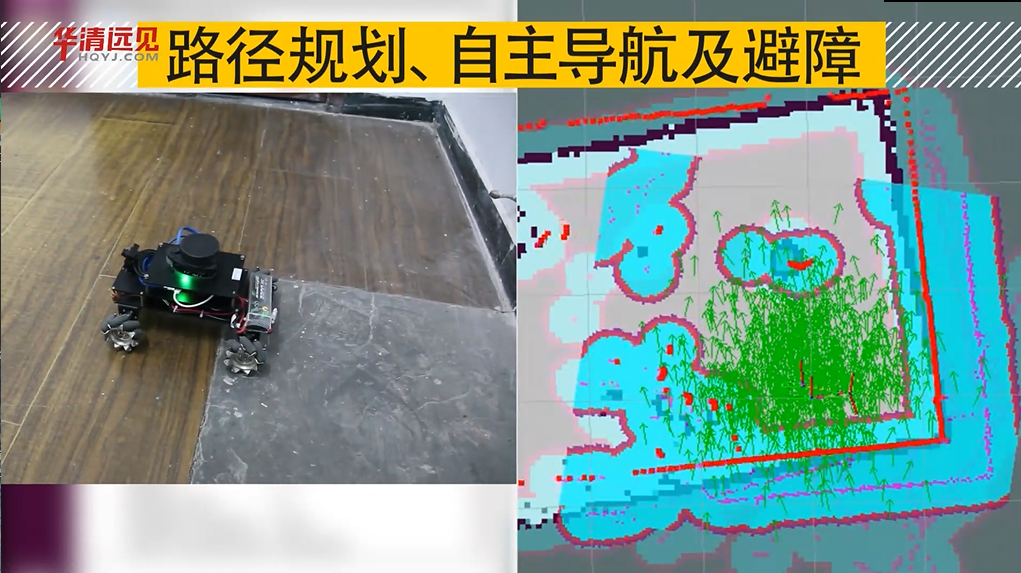
人工智能教学机器人/ROS
-
物联网行业创新应用
-
VR物联网
-
工控板